前言:最近我们学校引进了一批新的小型ABB机器人,准备用来当作实训机器的。刚好我有过通讯安川机器人的经验,就让我来调试以下,通过prifinet通讯协议来控制机械臂运转。刚好编完,中间出现了几次问题,特地把我的编写经历整理成文档给大家分享一下。哈哈哈,菜鸟之作,勿喷勿喷!
设备型号:西门子1214C DC/DC/DC型;ABB机器人IRB 1200;
编程软件:博图V13;RobotStudio 6.08;
以下为具体步骤:
- 打开博图组态画面拖入一台1200plc
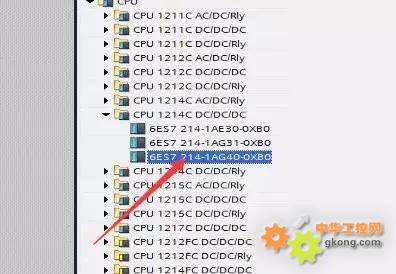
2,点击plc的网口设置IP地址:192.168.8.100

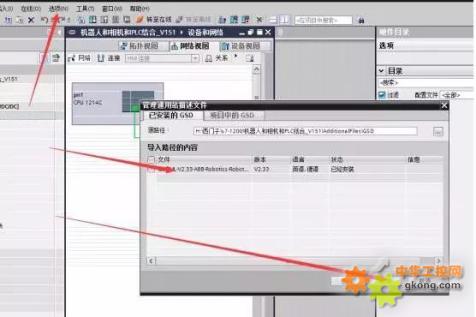
3,安装ABB机器人GSD文件(1工具、2选项、3管理通用站文件描述、4选择GSD文件所在位置、5安装)
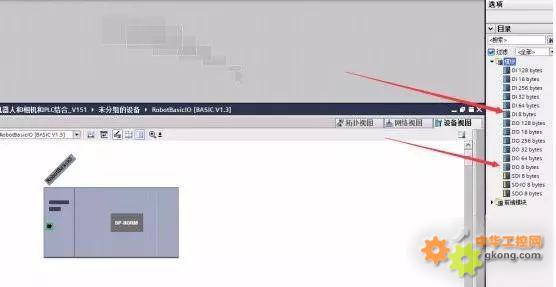
4,添加机器人设备(1其他现场设备2profinetIO,3I/O 4ABBROBOTICS,5robotdevice6.basic v。3 7拖入网络视图

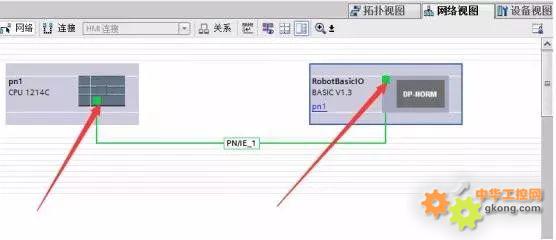
5,将plc与机器人的网口用线连接起来
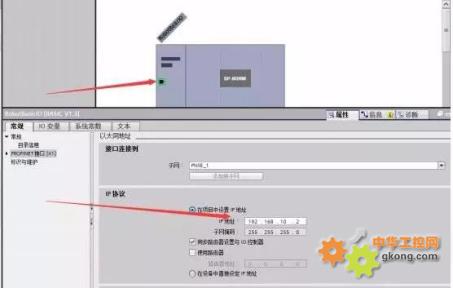
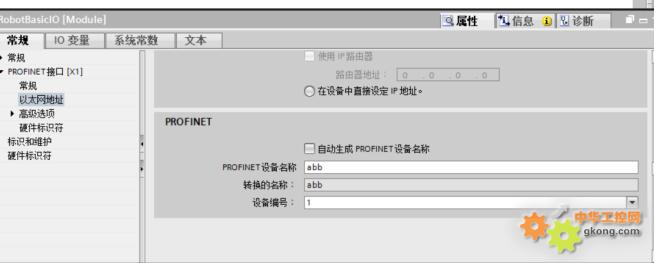
6,双击机器人设备网口将机器人的IP地址设置为plc的同一网段
7,配置发送与接收数据包,选择8个字节,收8个字节
8,同时更改机器人设备名称
机器人端设置
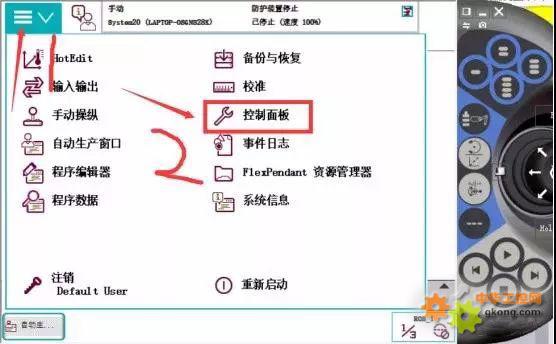
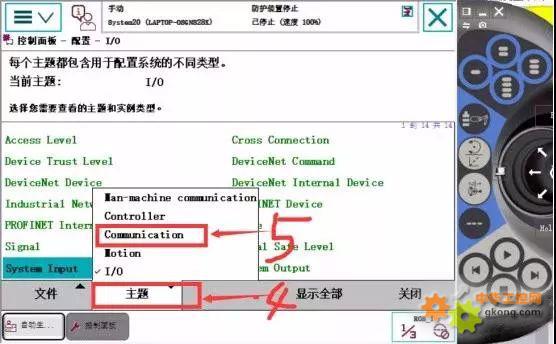
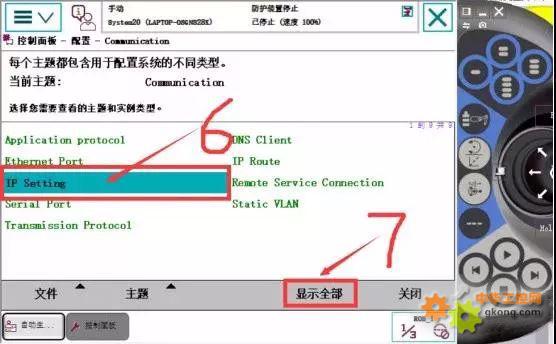
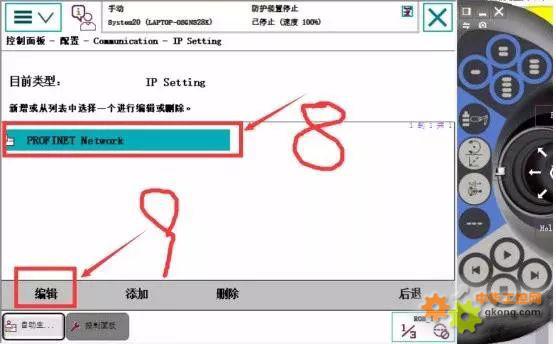
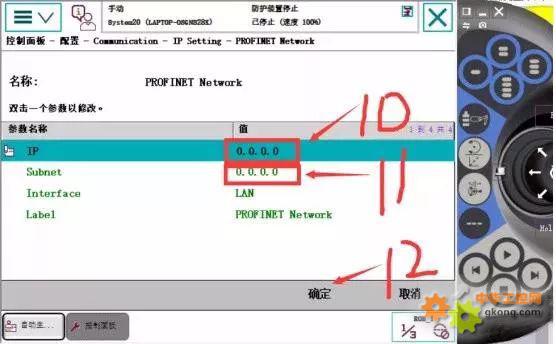
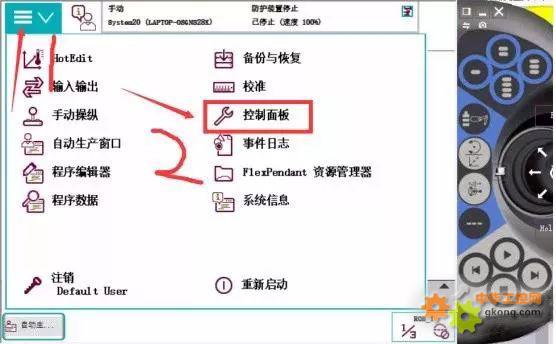
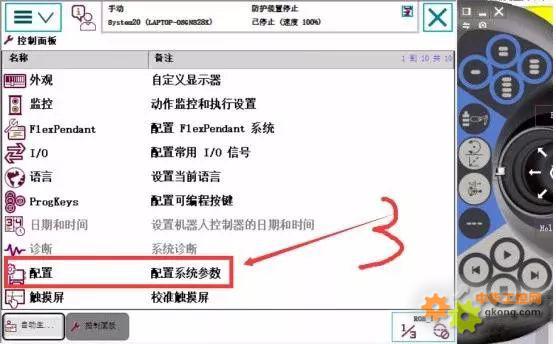
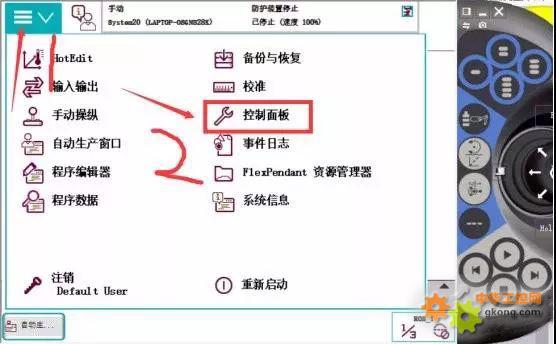
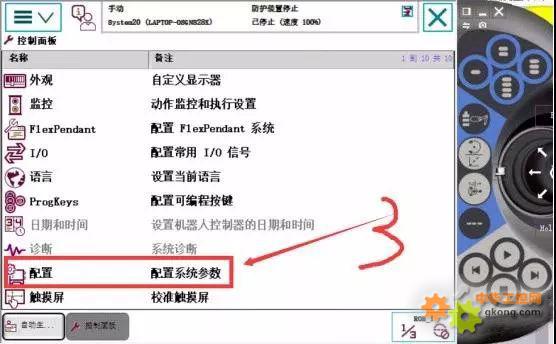
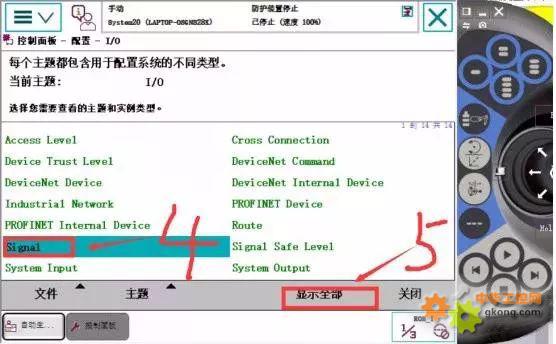
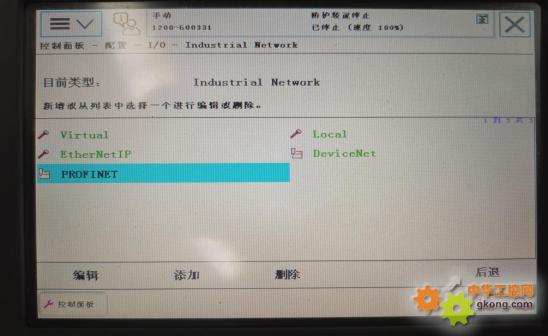
- 控制面板-配置-主题-communication-IPsetting-显示全部-Profinetwork,编辑-设置对应的IP地址:192.168.8.11
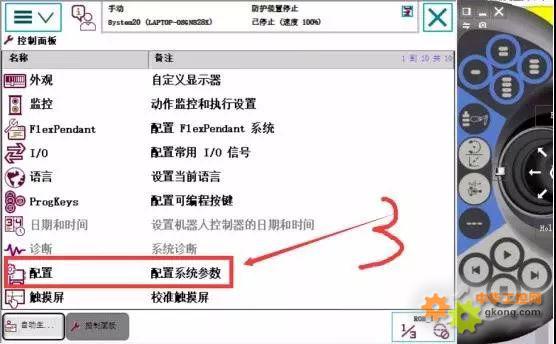
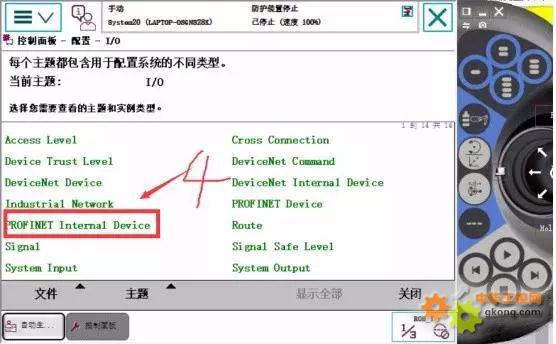
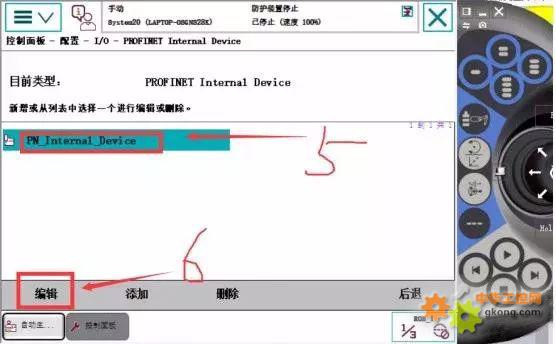
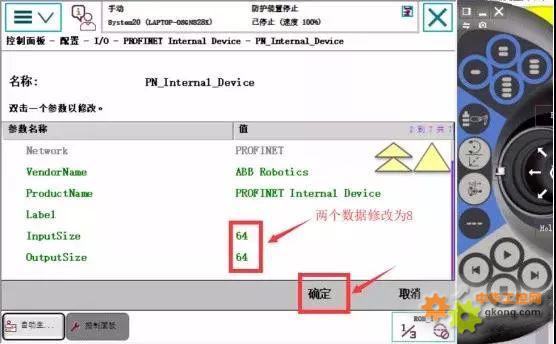
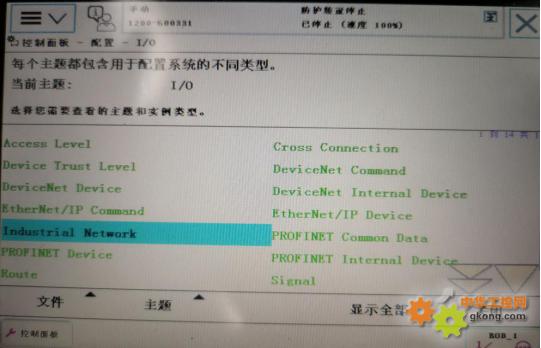
2,控制面板-配置-主题-I/O-PROFINET internal device-显示全部-添加 来自模板的值,选择PN-internal-device,input size 修改为8 outputsize修改值为8 确定
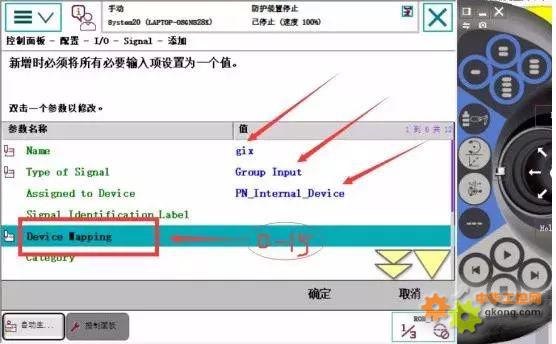
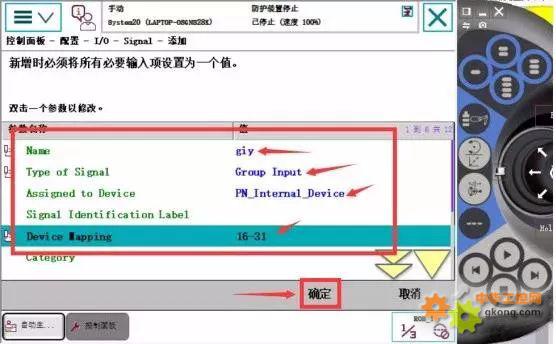
3,控制面板-配置-主题-I/O-signal,添加,地址都为0-15设置输入组和输出组
(图中16~31改为0~15)



4,在示教器内修改机器人PROFINET的名称与博途内设置名字相同
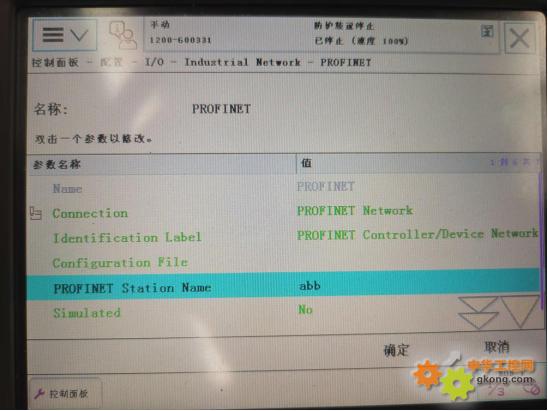
以上就是机器人的全部设置,完成设置之后就可以和PLC进行Profinet通讯了。
结语:以上就是我完整的调试步骤了,跟着图片一步一步来设置基本上是没有问题的。
本文来源中华工控网,版权归原作者所有,如侵立删!


















